Raspberry Pi – Formula Pi
Bei der neuen Kickstarter Kampagne Formula Pi geht es ganz im Sinne der Anki Overdrive Sets um KI gesteuerte Rennwagen die auf einer Rennstrecke um die Wette fahren. Im Gegensatz zu Anki Overdrive werden bei Formula Pi die Roboterautos über den Raspberry Pi gesteuert und verfolgen einen offeneren Open Source Ansatz. Perfekt für Bastler die mehr über Künstliche Intelligenz bei selbst fahrenden Autos lernen wollen.
Raspberry Pi – Formula Pi
Vor einigen Jahren hat mich an der Keynote von Apple die Präsentation von Anki Overdrive (damals noch Anki Drive) mehr begeistert als alle vorgestellten Apple Geräte und Innovationen. Wie geil wäre es denn, mit dem Smartphone einen kleinen Rennwagen zu steuern und gegen andere KI gesteuerte Autos auf einer Teststrecke zu fahren. Besser als jede Carrera Rennbahn, denn man fährt nicht auf Schienen. Die Rennen sind viel dynamischer und abwechslungsreicher.
Bei der neuen Kickstarter Kampagne stellt das Team mit Formula Pi einen ähnlichen Ansatz vor. In einem kleinen Fahrzeugroboter (Yetiborg) kommt als Zentraleinheit der Raspberry Pi zum Einsatz. Der Grundgedanke hinter dem Projekt ist dem Käufer eine Hardware samt Software zur Verfügung zu stellen. Damit soll er lernen wie selbst fahrende Roboter funktionieren und dazu wird motiviert den Code weiter zu verbessern. Der kompetitive Ansatz das ganze als Rennserie mit dem Namen Formel Pi zu stellen gibt einem als „Teamchef“ die nötige Motivation um die eigenen Bots gegenüber der Konkurrenz zu verbessern. Es sind im ersten Schritt zwei Rennsaisonen geplant, eine Im Winter eine im Frühling. Dabei werden die Roboter der Teilnehmer zufällig gegen 4 andere Bots auf der Strecke bei PiBorg in 23 Runden antreten. Laut Beschreibung darf man zwischen den Rennen kleine Modifikationen am Gefährt machen und so zum Beispiel den Code zu aktualisieren. Die Rennen selbst werden live über Stream übertragen.
Egal ob man nun daran teilnehmen will oder nicht, als Unterstützer gibt es die Hardware des Bots. Das einzige was man selber beitragen muss ist der Raspberry Pi Zero, die Kamera und eine SD Karte mit dem System.
Die Technik
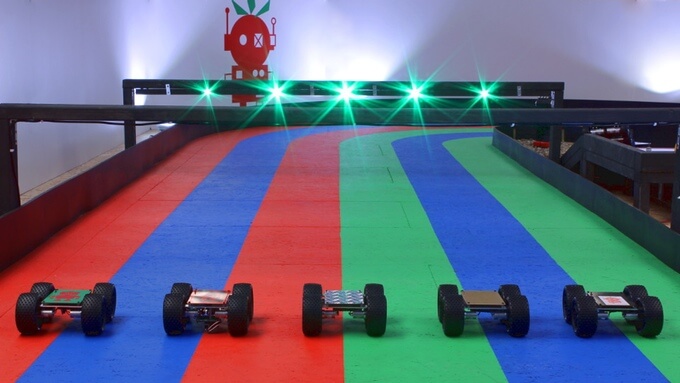
Die Raspberry Pi Roboter bestehen aus einigen wenigen Teilen. Basis ist eine aus Aluminium gefertigte Basis auf der 4 Motoren samt Reifen montiert werden. Der so bezeichnete „YetiBorg HS Zero“ Bot baut dabei auf die von PiBorg zuvor erfolgreichen Kampagne für einen Motorcontroller. Angetrieben werden die Räder durch die ZeroBorg Motoren, eine weitere Eigenentwicklung. Wie man an einem zerlegten Bot sehen kann wird dieser über eine 9V Batterie betrieben. Zur Steuerung kommt der angesprochene Motorcontroller zum Einsatz, zusätzlich noch der bekannte Raspberry Pi Zero und eine Raspberry Pi Kamera. Die Kamera ist der einzige Sensor in die Außenwelt, das heißt die Software steuert den Bot lediglich über visuelle Inputs.

Die Software
Der Bot wird über eine Basissoftware gesteuert, die ihn über die Strecke navigieren kann. Dabei ist aber absichtlich nur eine rudimentärer Code vorhanden, dieser ist Open Source und wird auf GitHub veröffentlicht. Die Anforderung an den Käufer ist nun auf dessen Basis den Bot zu verbessern. Der Code wird nach der Kampagne veröffentlicht, man darf in jedem Fall gespannt sein. In jedem Fall wird die Software über die Kamera die unterschiedlich farbigen Spuren der Strecke erkennen und basierend darauf die Räder steuern. Spannend wird für den Entwickler dann der Umgang mit der Konkurrenz. Der Roboter sollte andere Teilnehmer erkennen und recht schnell auf deren Aktionen reagieren können.
Fazit
Auch ich habe bereits eine Artikelserie zu meinem Raspberry Pi Roboter geschrieben. Es macht sehr viel Spaß so einen Roboter zusammenzubauen und an einer Software zur Steuerung zu arbeiten. Mal sehen ob ich über die Formula Pi Software meinen eigenen Roboter verbessern kann. Dazu muss ich ihn in den nächsten Tagen reaktivieren…
Was denkt ihr dazu? Sind die Preise auf Kickstarter gerechtfertigt?








video, or it did not happen
There are some videos on the Kickstarter page. The race season will start in winter 2016 and spring 2017.