Roboter Motoren ansteuern
In dieser Artikelserie zeige ich euch wie ihr die Roboter Motoren ansteuern könnt. Zuletzt habe ich ausführlich berichtet wie man einen Raspberry Pi Roboter zusammenbaut, nun ist es an der Zeit diesen auch zu benutzen. Das Wichtigste bei einem Roboter ist seine Mobilität, schließlich verstehen die meisten unter dem Begriff Roboter ein sich selbstständig bewegendes technisches Gerät (obwohl es auch stationäre Roboter in der Industrie gibt).
Roboter Motoren ansteuern
Ein Roboter wird durch Motoren bewegt. Elektromotoren sind recht einfach zu steuern, einfach herzustellen und es gibt sie in allen Größen und Stärken. In Roboterbausätzen finden sich üblicherweise Gleichstrommotor, die nur um einen bestimmten Winkel weiter gedreht werden können oder auch beliebig lange in eine Richtung.
Raspberry Pi verkabeln
Einen Schrittmotor kann man nicht direkt an den Raspberry Pi anschließen. Man benötigt einen Motor Controller oder auch Motor Driver genannt. Das ist ein technisches Bauteil über das man einen Gleichstrommotor steuert. Glücklicherweise hat mein Roboterbausatz ein Board, in dem bereits ein Motor Controller eingebaut ist. Laut Dokumentation einen mit der Typenbezeichnung L298P. So ein Bauteil ist aber auch für einen geringen Geldbetrag separat zu kaufen. Alternativ dazu gibt es auch noch zahlreiche andere Motortreiber.
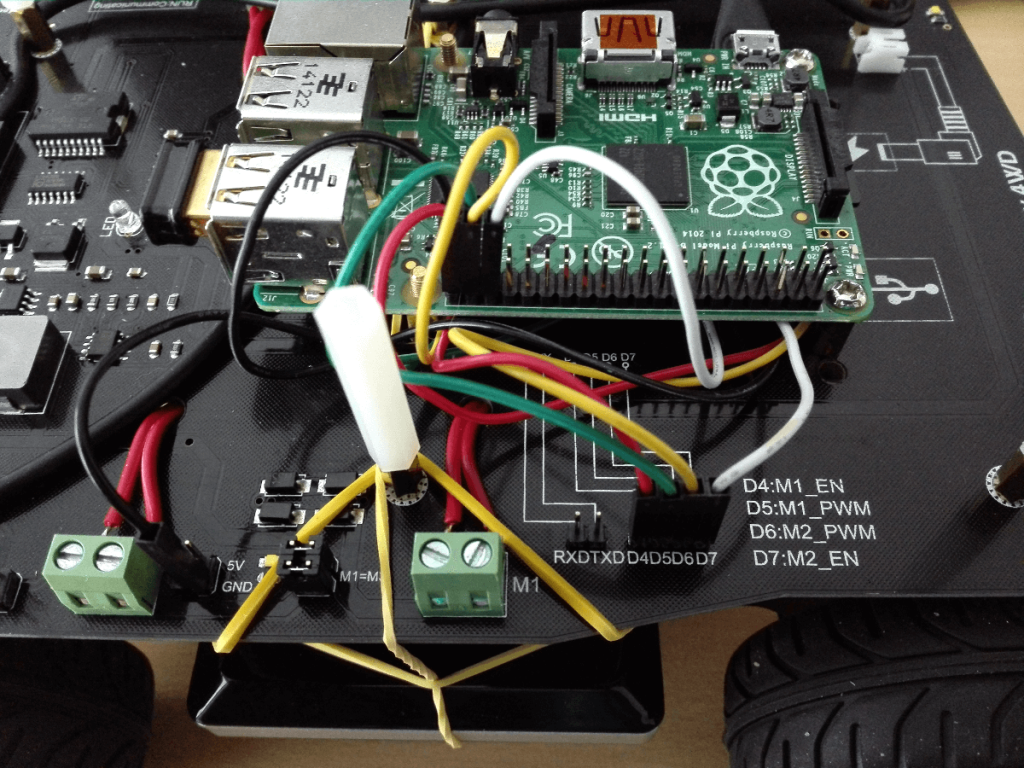
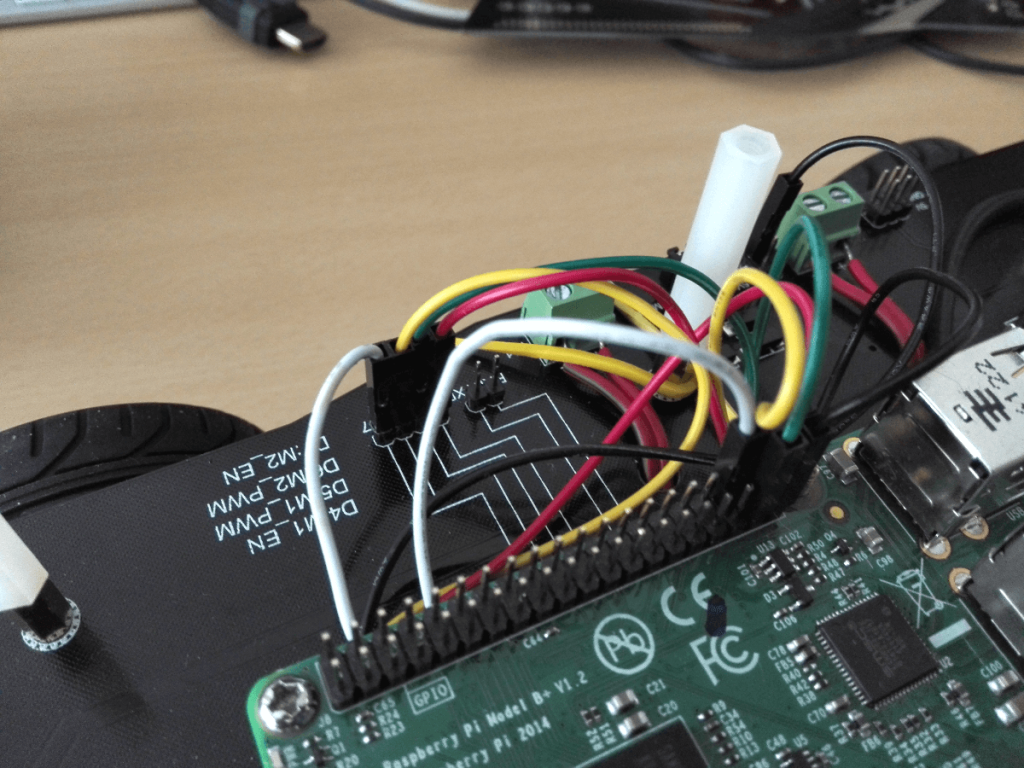
In meinem Fall beschränkt sich die Verkabelung auf folgende Pins:
- GND (schwarz)
Die Masse vom Board muss unbedingt mit einem Masse Pin des Raspberry Pi oder alternativ einem Arduino verbunden werden. Macht man das nicht, dann fließt kein Strom und die Motoren bewegen sich nicht. - Motoren links (weiß)
Liegt auf diesem Pin Spannung an, dann bewegen sich beide Motoren der linken Seite. Das Board hat einen Jumper mit dem man die beiden Motoren synchronisieren kann. Alternativ könnte man auch jeden der Motoren extra ansteuern, dafür müsste man jedoch diese über einen eigenen Motortreiber ansteuern. - Motoren links Geschwindigkeit (gelb)
Jede Seite der Motoren wird mit 2 Pins angesteuert. Neben der allgemeinen Information „Motor an“ liefert der zweite Pin die Geschwindigkeit. Diese wird analog angegeben – je mehr Spannung desto schneller bewegen sich die Motoren. - Motoren rechts (rot)
- Motoren rechts Geschwindigkeit (grün)
Die Geschwindigkeit wird über ein analoges Signal gesteuert. Je mehr Spannung anliegt, desto schneller drehen sich die Motoren. Man kann damit gut die Geschwindigkeit des Gefährts steuern. Leider sind die Pins vom Raspberry Pi aber ALLE digital, weshalb man entweder keine Geschwindigkeit oder Vollgas einstellen kann. Dank eines Tricks geht es aber trotzdem – dazu in einem der folgenden Artikel mehr!
Hardware
Für einen fahrenden Roboter benötigt man folgende Dinge:
- Motoren (2-x Motoren)
- Stromversorgung Motoren
- Steuereinheit (Raspberry Pi, Adruino oder vergleichbare Hardware)
- Stromversorgung Raspberry Pi
- Motortreiber
- Steckdrähte
- Steckbrett
- fertiges Board (optional statt Motortreiber und Steckdrähte)
Ein Roboter wird über zahlreiche Motoren betrieben. Es gibt die unterschiedlichsten Modelle. Beginnend mit 2 Roboter Motoren (einer für den Antrieb und einen für die Richtungsänderung), über herkömmliche vierrädrige Fahrzeuge (mit Rädern oder Ketten), über Insekten artige Modelle mit beliebig vielen Beinen bis zu humanoiden mit 2 Beinen die jedes leicht 10 Gelenke haben kann. Je mehr Motoren man einsetzt, desto schwieriger wird die Fortbewegung. Mein Fahrzeug mit 4 Motoren ist da für Anfänger schon recht komplex.
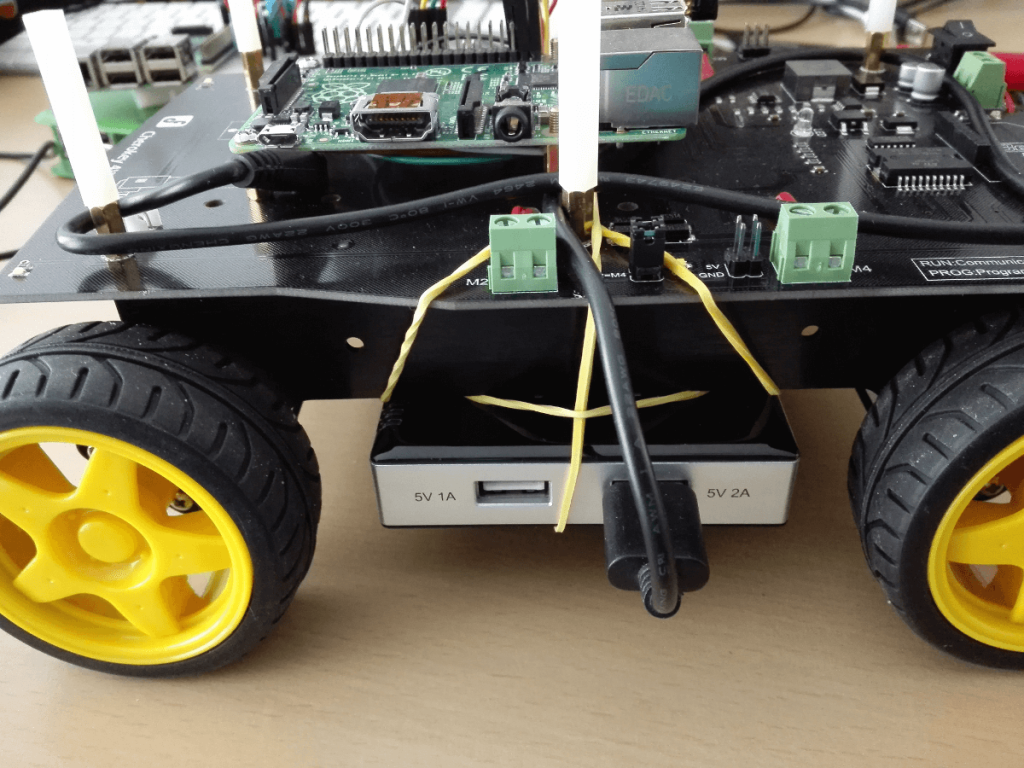
Bei meinem Bausatz wird das Board und damit die Motoren über 5 1.5 Volt Batterien, also insgesamt 7.5 Volt, mit Spannung versorgt. Die DC Motoren benötigen eine Betriebsspannung von 6-12 Volt mit maximal 2 Ampere, sind also ziemlich flexibel. Die normale Spannung von 5 Volt vom Raspberry Pi reicht nicht aus um die Roboter Motoren ansteuern zu können. Aus diesem Grund habe ich neben den 5 Batterien noch meine Powerbank auf das Chassis geschnallt um den Pi zu betreiben. Aktuell wird es noch mit Gummiringerl festgehalten, ich überlege schon den Kauf einer kleineren Powerbank dir neben den Pi passt…das hat aber noch Zeit bis alles fertig ist. Angeschlossen wird die Steuereinheit direkt mit 5 female-female Steckdrähten an das Board.

Falls man kein fertiges Board hat und die Motoren direkt mit der Steuereinheit verkabeln muss, dann verwendet man üblicherweise ein Steckbrett und verkabelt dort einen Motorentreiber direkt mit den Motoren.
Fazit
Über das Board von meinem Roboterbausatz kann ich meine Roboter Motoren ansteuern. Alternativ kann man dies aber auch selber über ein Steckbrett erreichen, man benötigt aber einen Motortreiber. Wenn man gerne bastelt findet man auch recht einfach eine Lösung dafür – Tutorials gibt es genug. Im nächsten Teil zeige ich euch die Software damit sich der Roboter endlich bewegt. Dieses wird auf dem Beispiel der Dokumentation zum Arduino Board basieren.
Teil 1 | Teil 2








Hi Servus, danke erstmal für deine Anleitung. Baue gerade mit dem selben Chassis. Nur mal eine Frage: hast du in deinen Bilder 5V auf GND gelegt? 😀
ja danke für den Hinweis. Das ist natürlich falsch, im Bild darunter passt es. Das hab ich wohl während der Entwicklung gemacht und nicht mehr kontrolliert.