Roboter Board verkabeln
Im vierten Teil meiner Raspberry Pi Roboter Artikelreihe zeige ich euch nun wie man das Board verkabeln kann und auf das Roboter Chassis montiert. Die 4 Motoren sind dann einsatzbereit. Die Montage wird dadurch beendet und wir können endlich mit der Software und der Konfiguration vom Raspberry Pi loslegen.
Roboter Board verkabeln
Die Montage des Boards ist recht einfach. Im letzten Artikel habe ich bereits erwähnt, dass unter dem Board der Akku montiert wurde. Auf der Oberseite ist bereits der Raspberry Pi angeschraubt. Nun werden die 4 Kabel der Motoren durch die Löcher gesteckt und das Board am Chassis angeschraubt. Das ganze sieht dann folgendermaßen aus:

Motoren am Board anschließen
Die Kabel müssen nun in die dafür vorgesehenen Halterungen gegeben und angeschraubt werden. Bevor man macht, sollte man sich folgendes überlegen: der Anschluss an Plus- und Minuspol legt die Richtung fest, in welcher sich der Motor dreht. Es ist darauf zu achten, dass beide Motoren einer Seite gleich angeschlossen werden, ansonsten würden sie sich die Räder gegen-gleich bewegen. Falls man später auf diesen Fehler stoßen sollte, dann tauscht man beim jeweiligen Kabel einfach die beiden Kontakte am Board aus.
Kabelenden verzinnen
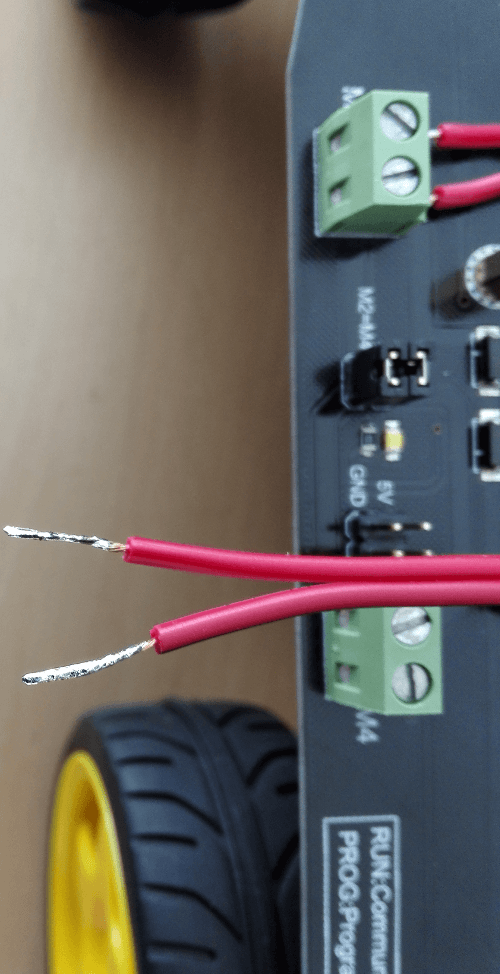 Einen kleinen Trick habe ich in einem Youtube Video zum Thema Löten für Anfänger gelernt. Nachdem man gut einen halben Zentimeter vom Kabelende ab isoliert hat sieht man, dass das Kabel aus mehreren sehr dünnen Drähten besteht. Diese so anzuschließen ist keine gute Idee, da man so schnell mehrere der ganz dünnen Drähtchen abbricht, vor allem dann, wenn man das Kabel später nochmal anders anbringen muss. Deshalb mein Tipp: die freigelegten Enden mit Zinn überziehen. Das geht so:
Einen kleinen Trick habe ich in einem Youtube Video zum Thema Löten für Anfänger gelernt. Nachdem man gut einen halben Zentimeter vom Kabelende ab isoliert hat sieht man, dass das Kabel aus mehreren sehr dünnen Drähten besteht. Diese so anzuschließen ist keine gute Idee, da man so schnell mehrere der ganz dünnen Drähtchen abbricht, vor allem dann, wenn man das Kabel später nochmal anders anbringen muss. Deshalb mein Tipp: die freigelegten Enden mit Zinn überziehen. Das geht so:
- den ab isolierten Draht verdrehen
- den heißen Lötkolben unterhalb des Drahtes anbringen
- von oben Lötzinn auf den Draht halten, sobald der heiß genug ist verrinnt der Zinn schön und verteilt sich zwischen den einzelnen Adern des Drahtes und verklebt diese. Dieses verzinnte Ende kann man nun wunderbar mit der Schraubvorrichtung in der Halterung befestigen.
Sobald alle 4 Kabel angeschlossen sind ist die Montage fertig. Wenn man nun die Batterien ins Akkufach gibt, beziehungsweise einen geladenen Akku anschließt und den Schalter auf 1 stellt sollten die LED Lichter des Boards leuchten. Die Motoren bewegen sich noch nicht, das können wir erst mit der Software über den Raspberry Pi machen.

Fazit
Das Roboter Board verkabeln ist gar nicht schwer, mit den angeschlossenen Motoren ist die Montage des Roboter Bausatzes abgeschlossen. Von nun an können wir uns im die Software kümmern und dem Roboter bewegen. Dazu mehr in einem der nächsten Artikel.
War die Anleitung für euch nachvollziehbar? Gibt es Bereiche die ich noch nicht ausführlich genug beschrieben habe?
Teil 1 | Teil 2 | Teil 3 | Teil 4





Kabel die angeschraubt werden, darf man NICHT verzinnen, da sich sich dann schnell wieder lockern. Lernt man seit 30 Jahren in der Elektriker und Elektroniker Ausbildung. Aderendhülsen sind hier angesagt.
Interessant, danke für diese Information.
Hallo Werner,
könntest du vielleicht eine Einkaufsliste inkl. Links erstellen?
Gerne auch mit dem Raspberry, Akku und alles was du sonst noch gekauft hast oder man allgemein gebrauchen kann.
Ich würde den Roboter gerne nachbauen, habe bisher aber noch nichts dafür gekauft, und gerade beim Chassis würde mich interessieren, wo ich diesen schnell und zuverlässig beziehen kann.
Besten Dank.
Danke für das Feedback. Ist eine gute Idee, werde das in den nächsten Tagen nachreichen – also dran bleiben 😉
Super. Vielen Dank, ich freu mich darauf.
Vielleicht hab ich es übersehen, aber gibt es nun schon eine Einkaufsliste mit den Komponenten?
Einkaufsliste
Derzeit arbeite ich an einer Verbesserung der Navigation vom Roboter…ein Artikel dazu wird bald folgen!
Alternativ kann man auch Aderendhülsen verwenden. Trotzdem interessantes Thema. Weiter so …
Sehr spannende Artikel, danke dafür! Werden Sie noch die weiteren Artikel zur Software und Ansteuerung über den Raspi veröffentlichen?
ja sicher!
Hi. Schon einen Plan wann du über die Software schreibst ?
passt nur mein Raspberry nicht in die Halterungen?
Nein, das Board ist für den Arduino konzipiert. Ich habe meinen Raspberry Pi nur mit 2 Halterungen anschrauben können. Hält aber trotzdem.
aah ja das ist Richtig 🙂
Hallo Werner
tolle Beschreibung, danke dafür, wie geht es weiter wo finde ich das weitere Tutorial wie den Bot programmiert hast?
Hi Werner,
wann kommt denn das Video zur Programmierung?
MfG
Sehr geehrter Herr Ziegelwanger,
ein toller Beitrag. Leider finde ich die Stückliste nicht mehr. Würden Sie mir helfen? Vielen Dank
MfG Heinz wiemeyer